










IoT (WiFi | BT) Face Eye Tracking / Recognition
Description of IoT (WiFi | BT) Face Eye Tracking / Recognition
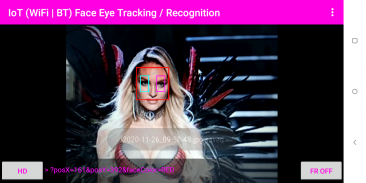
The advancement and development of high resolution per frame cameras in recent years motivate both engineers and students in the research and creation of applications based on "automated" computer vision algorithms, a frequent task used in the tracking of object movements and position, as well as its own characteristics, such as: object shape, object color, etc.
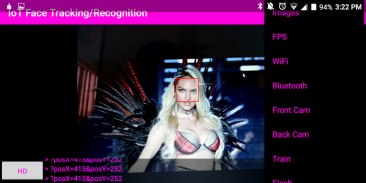
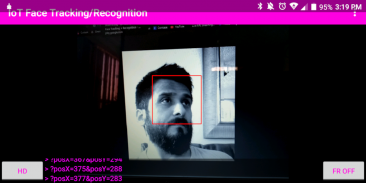
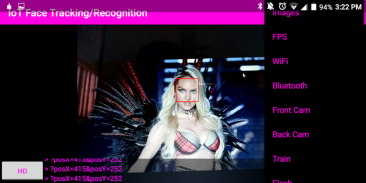
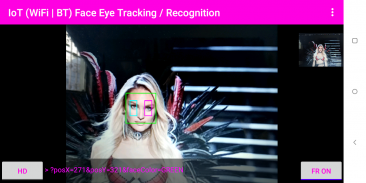
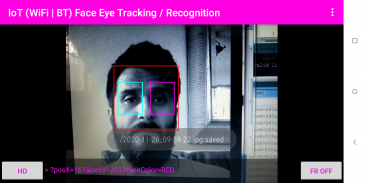
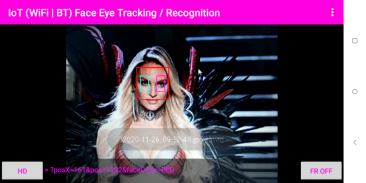
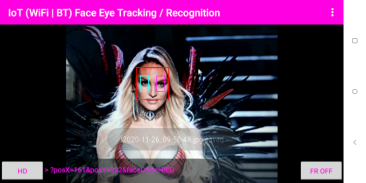
In this case, the project is based on the tracking and recognition of faces. If it detects a face, it focuses it within a red frame. If it recognizes it in a lower percentage, the focus is within a yellow frame, and if the percentage is high or very high, it focuses it within a green frame.
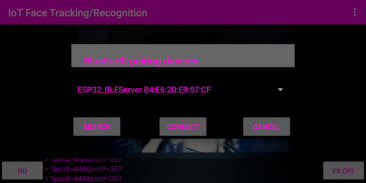
Communicate with Arduino and WiFi modules like CC3000, ESP32 and ESP8266.
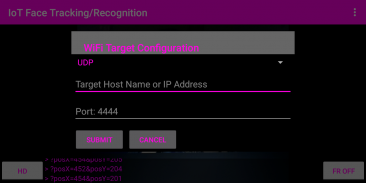
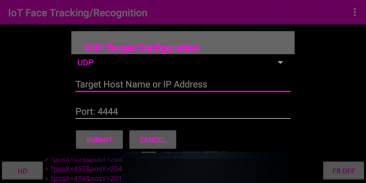
- Connect your mobile to an access point.
- Enter target host on app.
- Change port if needed for both server and client.
How It Works.
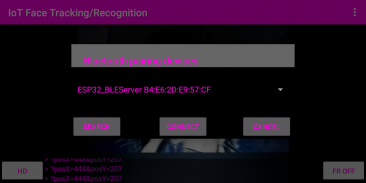
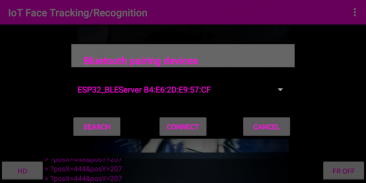
WiFi module receives information about the object through a WiFi module, in this case the ESP32 , ESP8266 and Breakout Board CC3000 from TI. The communication is done through UDP or TCP sockets client server "NOW COMMUNICATION CAN BE ACHIEVED THROUGH BLUETOOTH" the application in the mobile sends the necessary data (frame size, position and "face color" for horizontal and vertical servo) to the microcontroller so that this can perform the calculations with the information sent and perform the updates in the servos, in this case only the horizontal.
UDP and TCP:
data is send as String.
BLUETOOTH:
data is send as BYTES.
IoT (WiFi | BT) Face Eye Tracking / Recognition - Version 8.0.1
(21-01-2023)IoT (WiFi | BT) Face Eye Tracking / Recognition - APK Information
APK Version: 8.0.1Package: atoz.automation.wifi.iot.facerecognitiontracking






 4.34
4.34





Apps in the same category


You may also like...







